二次システムの特性
OctaveのGUIがいい感じになったので、制御を体感してもらうために、簡単なサンプルを示します。
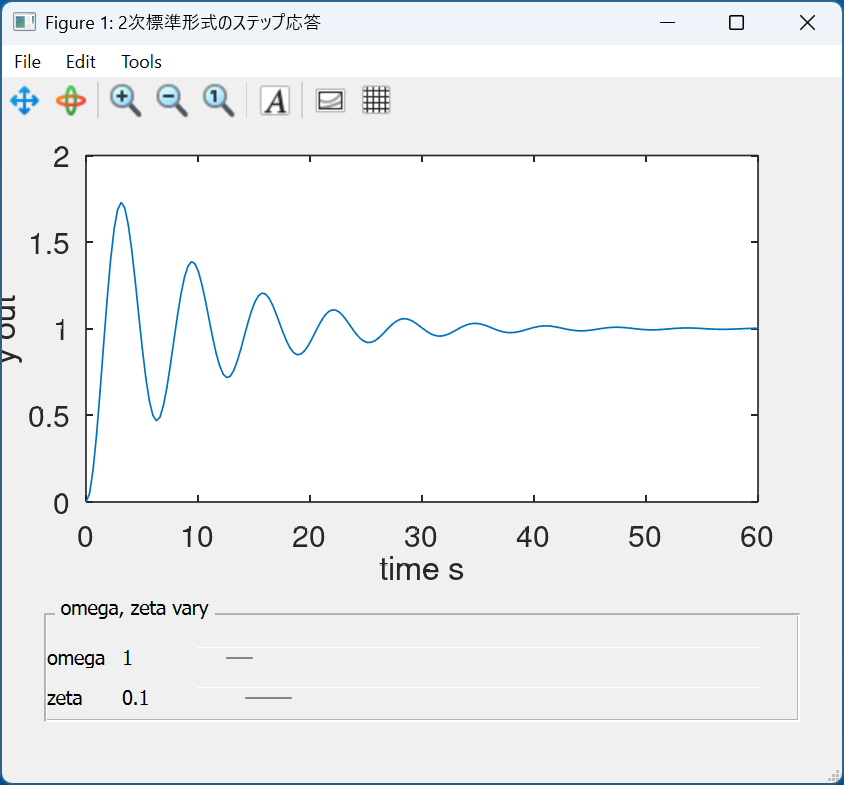
二次標準形式の時間応答
伝達関数 $$G(s)=\frac{{\omega_n}^2}{s^2+2\zeta\omega_n s +{\omega_n}^2}$$ の時間応答は 減衰係数$\zeta$と固有角周波数$\omega_n$の値で大きく変化します。
スライダーを動かすと$\zeta,\omega_n$が変化し、それに応じた時間応答を表示します。 観察してください。
ソースをDLまたはclipboardの内容を保存して、手元のPCでOctaveを起動して確認してください。
1clear all
2close all
3clc
4
5
6pkg load control
7
8h.fnc= @(w,z) tf([w*w],[1 2*z*w w*w]);
9h.gf=figure("position",[50 50 560 420],"name","2次標準形式のステップ応答");
10%defaultは[300 200 560 420].4:3
11
12
13function update_plot(obj, init=false)
14 hs=guidata(obj);
15 replot=false;
16 recalc=false;
17 % getcallbackobject:
18 ## gcbo holds the handle of the control
19 switch (gcbo)
20 case {hs.zeta_sl}
21 zeta_gui=get(gcbo, "value");
22 replot=true;
23 recalc=true;
24 omega_gui=get(hs.omega_sl,"value");
25 set(hs.zeta_value,"string",num2str(zeta_gui));
26 case {hs.omega_sl}
27 omega_gui=get(gcbo, "value");
28 replot=true;
29 recalc=true;
30 zeta_gui=get(hs.zeta_sl,"value");
31 set(hs.omega_value,"string",num2str(omega_gui));
32 end
33
34 if(recalc==true)
35 omega_n=omega_gui;
36 zeta=zeta_gui;
37 G=hs.fnc(omega_n,zeta);
38 [y t]=step(G);
39 end
40
41 if(replot==true)
42 hs.plot=plot(t,y);
43 set(gca,"xlabel","time s","ylabel", "y out","fontsize",20);
44 %guidata (obj, hs);
45 end
46
47end
48
49h.p=uipanel(
50 "title","\omega, \zeta vary",
51 "position",[0.05 0.05 0.9 0.2]);
52
53zeta_ini=0.1;
54omega_ini=1;
55
56h.zeta_disp=uicontrol(
57 "parent",h.p,
58 "style","text",
59 "units", "normalized",
60 "string","zeta",
61 "horizontalalignment", "left",
62 "position", [0 0.1 0.1 0.2]);
63
64h.zeta_value=uicontrol(
65 "parent",h.p,
66 "style","text",
67 "units", "normalized",
68 "string",num2str(zeta_ini),
69 "horizontalalignment", "left",
70 "position", [0.1 0.1 0.1 0.2]);
71
72h.zeta_sl=uicontrol(
73 "parent",h.p,
74 "style","slider",
75 "units", "normalized",
76 "string", "slider",
77 "value", zeta_ini,
78 "max",2,
79 "min",0.001,
80 "sliderstep",[0.01 0.1],
81 "horizontalalignment", "left",
82 "position", [0.2 0.1 0.75 0.2],
83 "callback", @update_plot );
84
85h.omega_disp=uicontrol(
86 "parent",h.p,
87 "style","text",
88 "units", "normalized",
89 "string","omega",
90 "horizontalalignment", "left",
91 "position", [0 0.5 0.1 0.2]);
92
93h.omega_value=uicontrol(
94 "parent",h.p,
95 "style","text",
96 "units", "normalized",
97 "string",num2str(omega_ini),
98 "horizontalalignment", "left",
99 "position", [0.1 0.5 0.1 0.2]);
100
101
102h.omega_sl=uicontrol(
103 "parent",h.p,
104 "style","slider",
105 "units", "normalized",
106 "string", "slider",
107 "value", omega_ini,
108 "max",100,
109 "min",0.1,
110 "sliderstep",[0.001 0.01],
111 "position", [0.2 0.5 0.75 0.2],
112 "callback", @update_plot );
113
114
115set (h.gf, "color", get(h.gf, "defaultuicontrolbackgroundcolor"));
116
117h.ax=axes(h.gf,"position",[0.1 0.4 0.8 0.55]);
118
119%初期描画用伝達関数step応答
120G=h.fnc(omega_ini,zeta_ini);
121[y t]=step(G);
122h.plot=plot(t,y);
123set(gca,"xlabel","time s","ylabel", "y out","fontsize",20);
124
125guidata(h.gf,h);% guidata(figure handle,datacontainer)
126%これがなかったらerror : matrix cannot be indexed with . になる
127
128update_plot(h.gf,true);
極位置と応答特性の関係(その1)
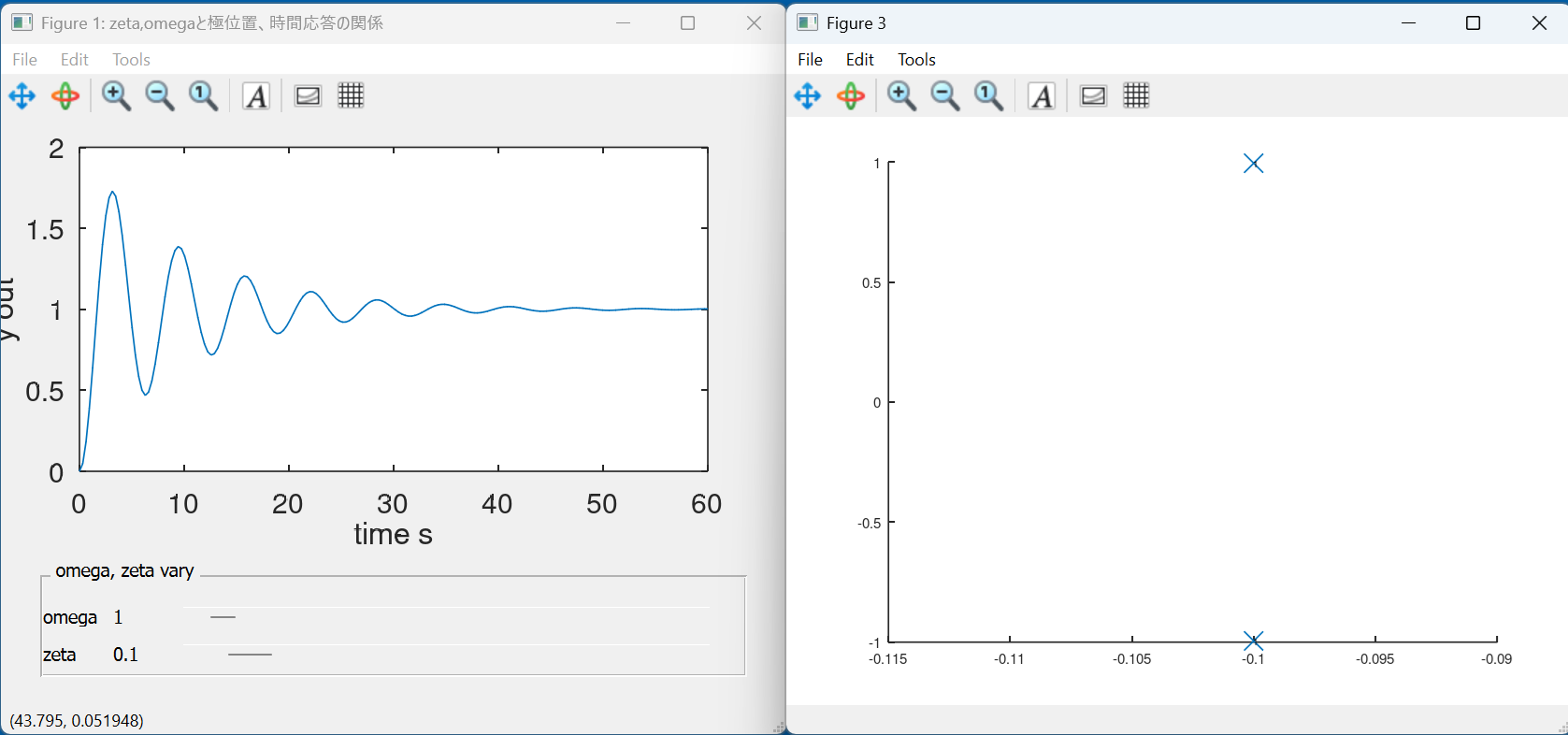
上記伝達関数の時間応答と、極位置の関係を示します。
1
2clear all
3close all
4clc
5
6%graphics_toolkit(qt)%なくてもいい,qtがdefaultになっている
7
8pkg load control
9
10h.fnc= @(w,z) tf([w*w],[1 2*z*w w*w]);
11%h.gf=figure("position",[50 100 700 600],"name","zeta,omegaと極位置、時間応答の関係");
12h.gf=figure("position",[10 50 560 420],"name","zeta,omegaと極位置、時間応答の関係");
13%defaultは[300 200 560 420].4:3
14
15function complex_plot(pl)
16global count=1;
17 [r c]=size(pl);
18 for i=1:r
19 x(i)=real(pl(i));
20 y(i)=imag(pl(i));
21 end
22 hold on
23 plot(x,y,"x");
24 text(x,y,num2str(count));
25 count=count+1;
26end
27
28
29
30function update_plot(obj, init=false)
31 hs=guidata(obj);
32 replot=false;
33 recalc=false;
34
35 % get_call_back_object:
36 ## gcbo holds the handle of the control
37 switch (gcbo)
38 case {hs.zeta_sl}
39 zeta_gui=get(gcbo, "value");
40 replot=true;
41 recalc=true;
42 omega_gui=get(hs.omega_sl,"value");
43 set(hs.zeta_value,"string",num2str(zeta_gui));
44 case {hs.omega_sl}
45 omega_gui=get(gcbo, "value");
46 replot=true;
47 recalc=true;
48 zeta_gui=get(hs.zeta_sl,"value");
49 set(hs.omega_value,"string",num2str(omega_gui));
50 end
51
52 if(recalc==true)
53 omega_n=omega_gui;
54 zeta=zeta_gui;
55 G=hs.fnc(omega_n,zeta);
56 [y t]=step(G);
57 end
58
59 if(replot==true)
60 figure(1)
61 hs.plot=plot(t,y);
62 % figure(2)
63 %plot(t,y);
64 set(gca,"xlabel","time s","ylabel","y out","fontsize",20);
65 %guidata (obj, hs);%なくてもいい?!
66
67 figure(3)
68 [pole,zero]=pzmap(G);
69 complex_plot(pole)
70 end
71
72end
73
74h.p=uipanel(
75 "title","\omega, \zeta vary",
76 "position",[0.05 0.05 0.9 0.2]);
77
78zeta_ini=0.1;
79omega_ini=1;
80
81h.zeta_disp=uicontrol(
82 "parent",h.p,
83 "style","text",
84 "units", "normalized",
85 "string","zeta",
86 "horizontalalignment", "left",
87 "position", [0 0.1 0.1 0.2]);
88
89h.zeta_value=uicontrol(
90 "parent",h.p,
91 "style","text",
92 "units", "normalized",
93 "string",num2str(zeta_ini),
94 "horizontalalignment", "left",
95 "position", [0.1 0.1 0.1 0.2]);
96
97h.zeta_sl=uicontrol(
98 "parent",h.p,
99 "style","slider",
100 "units", "normalized",
101 "string", "slider",
102 "value", zeta_ini,
103 "max",2,
104 "min",0.001,
105 "sliderstep",[0.01 0.1],
106 "horizontalalignment", "left",
107 "position", [0.2 0.1 0.75 0.2],
108 "callback", @update_plot );
109
110h.omega_disp=uicontrol(
111 "parent",h.p,
112 "style","text",
113 "units", "normalized",
114 "string","omega",
115 "horizontalalignment", "left",
116 "position", [0 0.5 0.1 0.2]);
117
118h.omega_value=uicontrol(
119 "parent",h.p,
120 "style","text",
121 "units", "normalized",
122 "string",num2str(omega_ini),
123 "horizontalalignment", "left",
124 "position", [0.1 0.5 0.1 0.2]);
125
126
127h.omega_sl=uicontrol(
128 "parent",h.p,
129 "style","slider",
130 "units", "normalized",
131 "string", "slider",
132 "value", omega_ini,
133 "max",100,
134 "min",0.1,
135 "sliderstep",[0.001 0.01],
136 "position", [0.2 0.5 0.75 0.2],
137 "callback", @update_plot );
138
139
140set (h.gf, "color", get(h.gf, "defaultuicontrolbackgroundcolor"));
141
142h.ax=axes(h.gf,"position",[0.1 0.4 0.8 0.55]);
143
144%初期描画用伝達関数step応答
145G=h.fnc(omega_ini,zeta_ini);
146[y t]=step(G);
147h.plot=plot(t,y);
148set(gca,"xlabel","time s","ylabel", "y out","fontsize",20);
149
150%figure(3,"position",[750,100,640,480])
151figure(3,"position",[570,50,560,420])
152%defaultは[300 200 560 420].4:3
153[pole,zero]=pzmap(G);
154
155complex_plot(pole);
156
157guidata(h.gf,h);
158%これがなかったらerror : matrix cannot be indexed with . になる
159
160update_plot(h.gf,true);
極位置と応答特性の関係(その2)
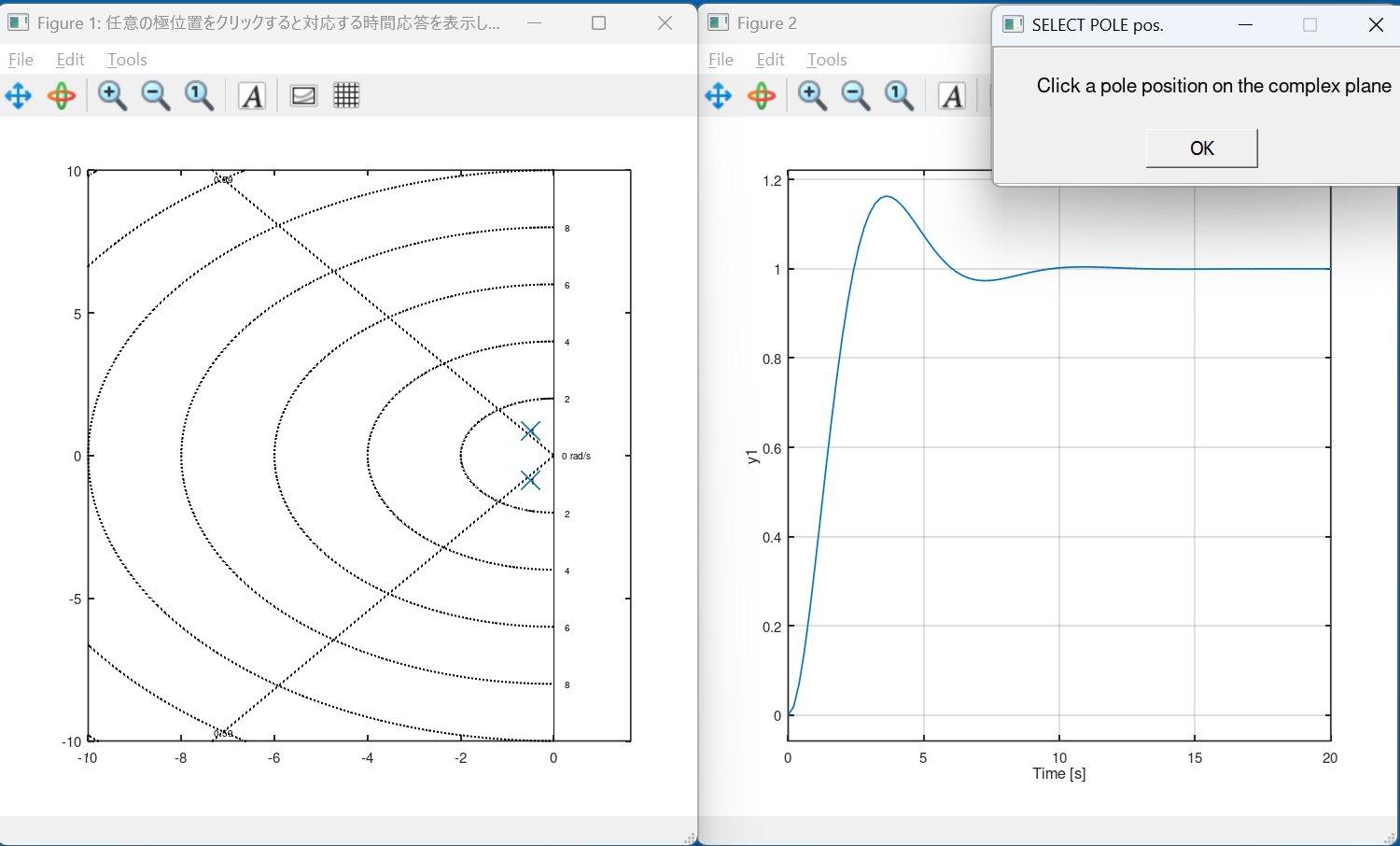
複素平面上の任意の点をクリックすれば、そこを極とする二次遅れ要素の時間応答 を示します。
1clear all
2close all
3clc
4
5pkg load control
6
7function step_cal(x,y)
8fnc= @(p1,p2) zpk([],[p1,p2],p1*p2);
9
10 p1=x+j*y;
11 p2=x-j*y;
12 G=fnc(p1,p2);
13 figure(2)
14 step(G);
15
16end
17
18function complex_plot(pl)
19 count=1;
20 [r c]=size(pl);
21 for i=1:r
22 x(i)=real(pl(i));
23 y(i)=imag(pl(i));
24 end
25 hold on
26 plot(x,y,"x");
27 text(x,y,num2str(count));
28 % count=count+1;
29end
30
31figure(1,"position",[100,100,500,500],"name","任意の極位置をクリックすると対応する時間応答を表示します。")
32axis([-10 1 -10 10])
33sgrid(0.5912,[])%zeta,omega
34 %daspect([1 1])
35
36G=tf(1,[1 1 1]);
37figure(2,"position",[600,100,500,500])
38step(G)
39[pole zero]=pzmap(G);
40figure(1)
41complex_plot(pole);
42
43count=2;
44
45H=msgbox("Click a pole position on the complex plane","SELECT POLE pos.");
46%H=msgbox("極位置として複素平面上の点をクリックしてください","極位置と時間応答");
47uiwait(H);
48
49while(1)
50 figure(1)
51 [x y btn]=ginput(1);
52 hold on
53 if(btn==1)
54 plot(x,y,"x")
55 plot(x,-y,"x");
56 text(x,y,num2str(count));
57 count=count+1;
58 step_cal(x,y);
59 else
60 break% error対策: text: invalid combination of points and text strings
61 end
62
63end
64
65close all
極位置と応答特性の関係(その3)
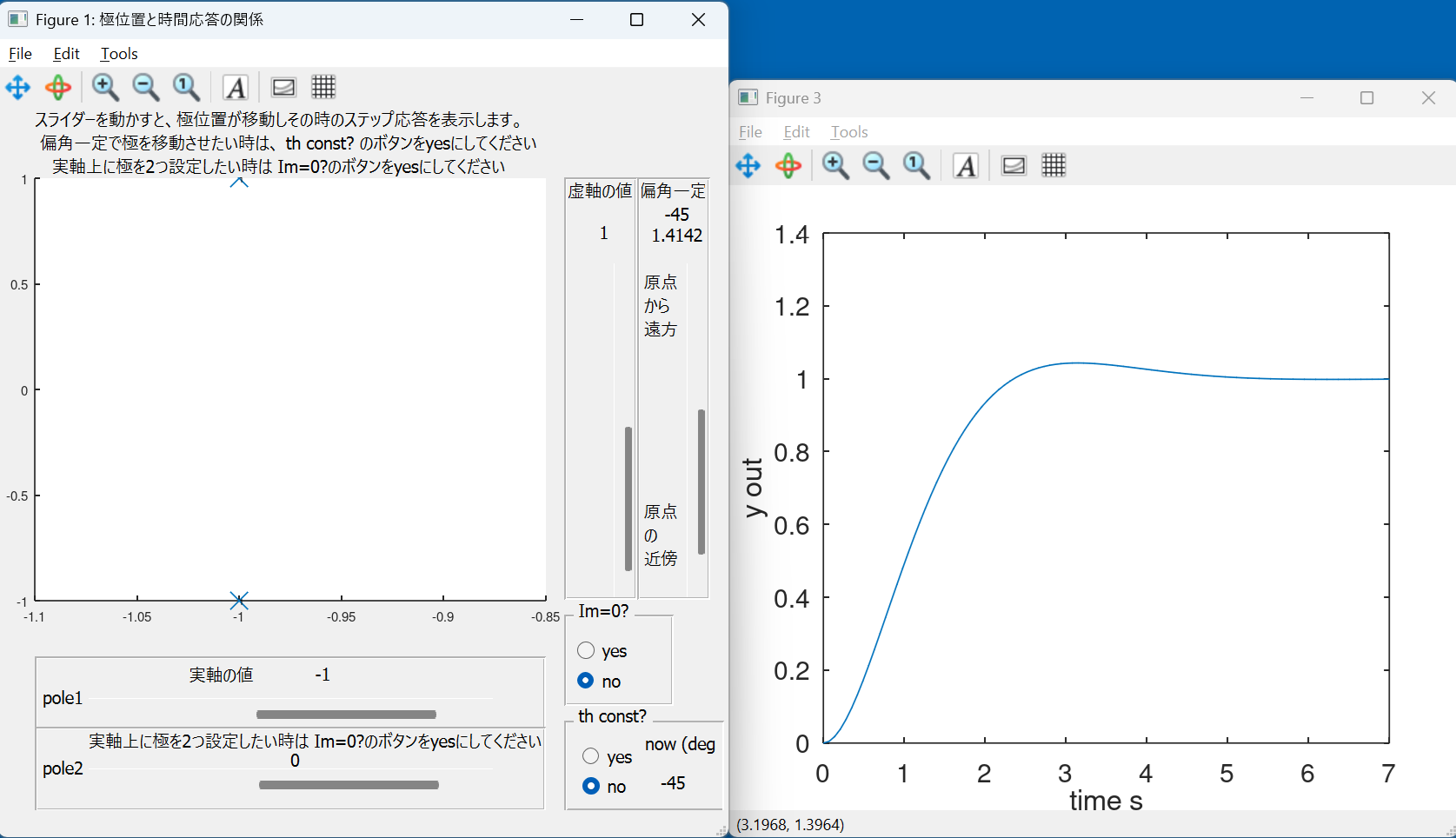
スライダーを動かすと極位置が変化し、その極位置を有する 二次遅れ要素の時間応答を表示します。
th_const?をnoのままでは実軸/虚数軸固定、
th_const?をyesとすると、偏角一定で、極位置が変化します。
1% 極位置指定からstep応答をみる
2
3clear all
4close all
5clc
6
7pkg load control
8
9h.fnc= @(p1,p2) zpk([],[p1,p2],p1*p2);
10h.gf=figure("position",[10 100 560 540],"name","極位置と時間応答の関係");
11%defaultは[300 200 560 420].4:3
12
13function complex_plot(pl)
14global count=1;
15
16[r c]=size(pl);
17 for i=1:r
18 x(i)=real(pl(i));
19 y(i)=imag(pl(i));
20 end
21 figure(1)
22 hold on
23 plot(x,y,"x");
24 text(x,y,num2str(count));
25 count=count+1;
26 % sgrid(zeta_com,[])
27end
28
29
30
31function update_plot(obj, init=false)
32 hs=guidata(obj);
33 replot=false;
34 recalc=false;
35
36 IMG_ZERO=get(hs.rb1,"value");
37 TH_CNST=get(hs.gp2_rb1,"value");
38
39 real_part_gui=get(hs.real_part_sl,"value");
40 imag_part_gui=get(hs.imag_part_sl,"value");
41 real_part2_gui=get(hs.real_part2_sl,"value");
42
43 th_cnst_gui=get(hs.th_cnst_sl,"value");
44 dist=sqrt(real_part_gui*real_part_gui+imag_part_gui*imag_part_gui);
45
46 if(IMG_ZERO==false)
47 th_angle=atan(imag_part_gui/real_part_gui)*180/pi;
48 end
49
50 % get_call_back_object:
51 ## gcbo holds the handle of the control
52 switch (gcbo)
53 case {hs.real_part_sl}
54 real_part_gui=get(gcbo, "value");
55 set(hs.real_part_value,"string",num2str(real_part_gui));
56 replot=true;
57 recalc=true;
58 case {hs.imag_part_sl}
59 imag_part_gui=get(gcbo, "value");
60 set(hs.imag_part_value,"string",num2str(imag_part_gui));
61 replot=true;
62 recalc=true;
63 case {hs.real_part2_sl}
64 real_part2_gui=get(gcbo, "value");
65 set(hs.real_part2_value,"string",num2str(real_part2_gui));
66 replot=true;
67 recalc=true;
68
69 case {hs.rb1} % buttongroupは両方イベント起こるので場合分け必要
70 if ( (get(hs.rb1, "value")==true) && (get(hs.rb2, "value")==false) )
71 IMG_ZERO=true;
72 else
73 IMG_ZERO=false;
74 end
75 replot=true;
76 recalc=true;
77 case {hs.rb2}
78 if ( (get(hs.rb2, "value")==true) && (get(hs.rb1, "value")==false) )
79 IMG_ZERO=false;
80 else
81 IMG_ZERO=true;
82 end
83 replot=true;
84 recalc=true;
85
86 case {hs.th_cnst_sl}
87 th_cnst_gui=get(gcbo, "value");
88 set(hs.th_cnst_value,"string",num2str(th_cnst_gui));
89
90 replot=true;
91 recalc=true;
92 case {hs.gp2_rb1} % buttongroupは両方イベント起こるので場合分け必要
93 if ( (get(hs.gp2_rb1, "value")==true) && (get(hs.gp2_rb2, "value")==false) )
94 TH_CNST=true;
95 else
96 TH_CNST=false;
97 end
98 replot=true;
99 recalc=true;
100 case {hs.gp2_rb2}
101 if ( (get(hs.gp2_rb2, "value")==true) && (get(hs.gp2_rb1, "value")==false) )
102 TH_CNST=false;
103 else
104 TH_CNST=true;
105 end
106 replot=true;
107 recalc=true;
108end
109
110 if(recalc==true)
111 if(IMG_ZERO==true)
112 p1=real_part_gui;
113 p2=real_part2_gui;
114 else
115 if(TH_CNST==true)
116 %座標計算時のみ、原点から計算する
117 real_part_gui=dist*th_cnst_gui*cos(pi-th_angle*pi/180);
118 imag_part_gui=dist*th_cnst_gui*sin(pi-th_angle*pi/180);
119 set(hs.real_part_value,"string",num2str(real_part_gui));
120 set(hs.imag_part_value,"string",num2str(imag_part_gui));
121 set(hs.th_cnst_value2,"string",num2str(th_angle));
122 set(hs.th_cnst_value_disp,"string",num2str(th_angle));
123 end
124
125 p1=real_part_gui+imag_part_gui*j;
126 p2=real_part_gui-imag_part_gui*j;
127
128 end
129 G=hs.fnc(p1,p2);
130 [y t]=step(G);
131 end
132
133 if(replot==true)
134 figure(3)
135 hs.plot=plot(t,y);
136 set(gca,"xlabel","time s","ylabel","y out","fontsize",20);
137
138 figure(1)
139 [pole,zero]=pzmap(G);
140 complex_plot(pole)
141 end
142
143end
144
145h.p_real=uipanel(
146 "position",[0.05 0.1 0.7 0.12]);
147
148h.p2_real=uipanel(
149 "position",[0.05 0.0 0.7 0.12]);
150
151h.p_imag=uipanel(
152 "position",[0.775 0.3 0.1 0.6]);
153
154h.th_cnst=uipanel(
155 "position",[0.875 0.3 0.1 0.6]);
156
157real_part_ini=-1;
158imag_part_ini=1;
159real_part2_ini=0;
160dist_ini=sqrt((real_part_ini*real_part_ini)+(imag_part_ini*imag_part_ini));
161th_ini=atan(imag_part_ini/real_part_ini)*180/pi;
162
163
164p1_ini=real_part_ini+imag_part_ini*j;
165p2_ini=real_part_ini-imag_part_ini*j;
166
167h.real_part1_disp=uicontrol(
168 "parent",h.p_real,
169 "style","text",
170 "units", "normalized",
171 "string","pole1",
172 "horizontalalignment", "left",
173 "position", [0.01 0.3 0.1 0.4]);
174
175h.real_part_disp=uicontrol(
176 "parent",h.p_real,
177 "style","text",
178 "units", "normalized",
179 % "string","real_part",
180 "string","実軸の値",
181 "horizontalalignment", "left",
182 "position", [0.3 0.6 0.2 0.4]);
183
184h.real_part_value=uicontrol(
185 "parent",h.p_real,
186 "style","text",
187 "units", "normalized",
188 "string",num2str(real_part_ini),
189 "horizontalalignment", "left",
190 "position", [0.55 0.6 0.1 0.4]);
191
192h.real_part_sl=uicontrol(
193 "parent",h.p_real,
194 "style","slider",
195 "units", "normalized",
196 "string", "slider",
197 "value", real_part_ini,
198 "max",10,
199 "min",-50,
200 "sliderstep",[0.1 1.0],
201 "horizontalalignment", "left",
202 "position", [0.1 0.1 0.8 0.4],
203 "callback", @update_plot );
204
205h.real_part2_disp=uicontrol(
206 "parent",h.p2_real,
207 "style","text",
208 "units", "normalized",
209 "string","pole2",
210 "horizontalalignment", "left",
211 "position", [0.01 0.3 0.1 0.4]);
212
213h.real_part2_disp=uicontrol(
214 "parent",h.p2_real,
215 "style","text",
216 "units", "normalized",
217 % "string","when p2 use, set yes at Im=0? button",
218 "string","実軸上に極を2つ設定したい時は Im=0?のボタンをyesにしてください",
219 "horizontalalignment", "left",
220 "position", [0.1 0.7 0.9 0.3]);
221
222h.real_part2_value=uicontrol(
223 "parent",h.p2_real,
224 "style","text",
225 "units", "normalized",
226 "string",num2str(real_part2_ini),
227 "horizontalalignment", "left",
228 "position", [0.5 0.45 0.2 0.3]);
229
230h.real_part2_sl=uicontrol(
231 "parent",h.p2_real,
232 "style","slider",
233 "units", "normalized",
234 "string", "slider",
235 "value", real_part2_ini,
236 "max",10,
237 "min",-50,
238 "sliderstep",[0.1 1.0],
239 "horizontalalignment", "left",
240 "position", [0.1 0.1 0.8 0.4],
241 "callback", @update_plot );
242
243
244h.imag_part_disp=uicontrol(
245 "parent",h.p_imag,
246 "style","text",
247 "units", "normalized",
248 % "string","imag_part",
249 "string","虚軸の値",
250 "position", [0.01 0.95 0.95 0.05]);
251
252h.imag_part_value=uicontrol(
253 "parent",h.p_imag,
254 "style","text",
255 "units", "normalized",
256 "string",num2str(imag_part_ini),
257 "position", [0.1 0.85 0.9 0.05]);
258
259h.imag_part_sl=uicontrol(
260 "parent",h.p_imag,
261 "style","slider",
262 "units", "normalized",
263 "string", "slider",
264 "value", imag_part_ini,
265 "max",50,
266 "min",0,
267 "sliderstep",[0.1 1.0],
268 "position", [0.7 0 0.4 0.8],
269 "callback", @update_plot );
270
271h.th_cnst_disp=uicontrol(
272 "parent",h.th_cnst,
273 "style","text",
274 "units", "normalized",
275 % "string","th_cnst",
276 "string","偏角一定",
277 "position", [0.01 0.95 0.95 0.05]);
278
279h.th_cnst_value=uicontrol(
280 "parent",h.th_cnst,
281 "style","text",
282 "units", "normalized",
283 "string",num2str(dist_ini),
284 "position", [0.1 0.85 0.9 0.035]);
285
286h.th_cnst_value2=uicontrol(
287 "parent",h.th_cnst,
288 "style","text",
289 "units", "normalized",
290 "string",num2str(th_ini),
291 "position", [0.1 0.9 0.9 0.035]);
292
293h.th_cnst_sl=uicontrol(
294 "parent",h.th_cnst,
295 "style","slider",
296 "units", "normalized",
297 "string", "slider",
298 "value", dist_ini,
299 "max",10,
300 "min",0.01,
301 "sliderstep",[-0.1 -1.0],
302 "position", [0.7 0 0.4 0.8],
303 "callback", @update_plot );
304
305h.th_cnst_disp_far=uicontrol(
306 "parent",h.th_cnst,
307 "style","text",
308 "units", "normalized",
309 "string","原点\nから\n遠方",
310 "horizontalalignment", "left",
311 "position", [0.05 0.6 0.5 0.2]);
312h.th_cnst_disp_origin=uicontrol(
313 "parent",h.th_cnst,
314 "style","text",
315 "units", "normalized",
316 "string","原点\nの\n近傍",
317 "horizontalalignment", "left",
318 "position", [0.05 0.05 0.5 0.2]);
319
320
321gp = uibuttongroup ("title","Im=0?",
322 "Position", [ 0.775 0.15 0.15 0.15]);
323gp2 = uibuttongroup ("title","th const?",
324 "Position", [ 0.775 0 0.22 0.15]);
325
326h.rb1=uicontrol(
327 "parent",gp,
328 "style","radiobutton",
329 "units", "normalized",
330 "string", "yes",
331 "value", false,
332 "position", [0.1 0.4 0.7 0.4],
333 "callback", @update_plot );
334h.rb2=uicontrol(
335 "parent",gp,
336 "style","radiobutton",
337 "units", "normalized",
338 "string", "no",
339 "value", true,
340 "position", [0.1 0.05 0.7 0.4],
341 "callback", @update_plot );
342
343h.gp2_rb1=uicontrol(
344 "parent",gp2,
345 "style","radiobutton",
346 "units", "normalized",
347 "string", "yes",
348 "value", false,
349 "position", [0.1 0.4 0.7 0.4],
350 "callback", @update_plot );
351h.gp2_rb2=uicontrol(
352 "parent",gp2,
353 "style","radiobutton",
354 "units", "normalized",
355 "string", "no",
356 "value", true,
357 "position", [0.1 0.05 0.7 0.4],
358 "callback", @update_plot );
359
360h.th_cnst_label_disp=uicontrol(
361 "parent",gp2,
362 "style","text",
363 "units", "normalized",
364 "string","now (deg)",
365 "horizontalalignment", "left",
366 "position", [0.5 0.55 0.45 0.4]);
367
368h.th_cnst_value_disp=uicontrol(
369 "parent",gp2,
370 "style","text",
371 "units", "normalized",
372 "string", num2str(th_ini),
373 "horizontalalignment", "left",
374 "position", [0.6 0.1 0.3 0.4]);
375
376h.menu_label=uicontrol(
377 "parent",h.gf,
378 "style","text",
379 "units", "normalized",
380 "string", "スライダーを動かすと、極位置が移動しその時のステップ応答を表示します。\n 偏角一定で極を移動させたい時は、 th const? のボタンをyesにしてください\n 実軸上に極を2つ設定したい時は Im=0?のボタンをyesにしてください",
381 "horizontalalignment", "left",
382 "position", [0.05 0.9 1 0.1]);
383
384set (h.gf, "color", get(h.gf, "defaultuicontrolbackgroundcolor"));
385
386%h.ax=axes(h.gf,"position",[0.05 0.27 0.7 0.65]);
387h.ax=axes(h.gf,"position",[0.05 0.3 0.7 0.6]);
388
389%初期描画用伝達関数step応答
390G=h.fnc(p1_ini,p2_ini);
391[y t]=step(G);
392guidata(h.gf,h);% guidata(figure handle, datacontainer)
393%これがなかったらerror : matrix cannot be indexed with . になる
394
395%figure(3,"position",[800,100,700,600])
396figure(3,"position",[570,100,560,480])
397%defaultは[300 200 560 420].4:3
398h.plot=plot(t,y);
399set(gca,"xlabel","time s","ylabel", "y out","fontsize",20);
400
401figure(1);%,"position",[900,100,700,600])
402[pole,zero]=pzmap(G);
403%sgrid(zeta_com,[]);%zeta,omega
404
405complex_plot(pole);
406
407%guidata(h.gf,h);% guidata(figure handle, datacontainer)
408%これがなかったらerror : matrix cannot be indexed with . になる:fig(3)の前に移動
409
410update_plot(h.gf,true);
411
412%H=msgbox("Slide the mover to select a pole position");
413%H=msgbox("スライダーを動かすと、極位置が移動し、\n その時のステップ応答を表示します。\n 偏角一定で極を移動させたい時は、\n th const? のボタンをyesにしてください","使い方");
PID制御シミュレーション
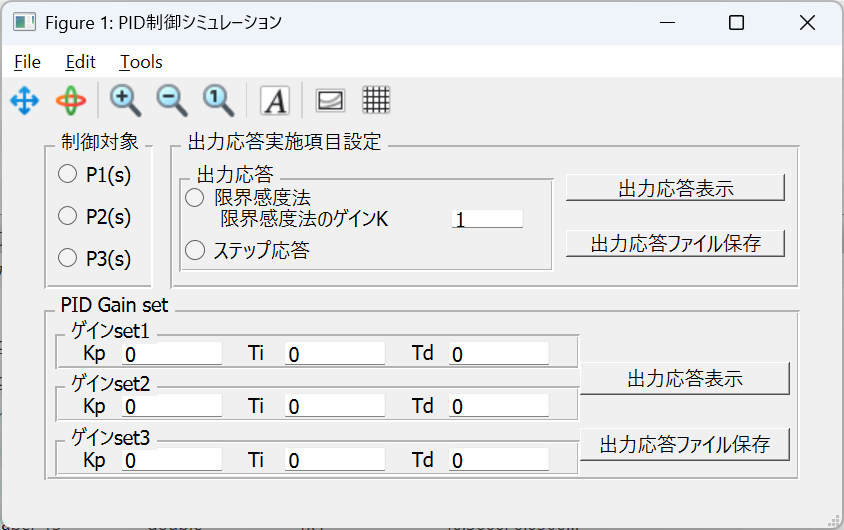
制御対象の伝達関数は以下のとおりです。
$$P1(s)=\dfrac{1}{s(2s+1)(0.5s+1)}$$
$$P2(s)=\dfrac{1}{s(s+2)}$$
$$P3(s)=\dfrac{1}{(s+1)(s+5)}$$
ボタンで選択します。
限界感度法やステップ応答を表示できます。
PIDゲインを設定すると閉ループシミュレーションを実行できます。
1%Octave ソース : PID制御系設計
2clear all
3close all
4clc
5
6pkg load control
7h.gf=figure("position",[10 300 560 250],"name","PID制御シミュレーション");
8h.wind=[570 100 560 420];%defaultは[300 200 560 420].4:3
9 %640-480
10
11h.P1=@() zpk([],[0 -0.5 -2],1);%(z,p,k),1/s(2s+1)(0.5s+1),Q1-P1
12h.P2=@() tf(1,[1 2 0]);%,1/s(s+2),Q1-P2
13h.P3=@() zpk([],[-1 -5],1);%(z,p,k),1/(s+1)(s+5)*1,Q2-応答データ取得に使用
14
15
16function prt_fig(fn,fnum)
17 ext='.png';
18 fname=["fig_" num2str(fnum) "_" fn ext];
19 % print(["fig_" fn "_" num2str(fnum) ".svg"],"-dsvg");
20 print(fnum, fname,'-dpng','-S640,480');
21end
22
23function [P t_end lab fnum]=set_model(obj,P1_select,P2_select,P3_select)
24 hs=guidata(obj);
25 if (P1_select== true)
26 P=hs.P1();
27 t_end=[20 40];%開ループ,閉ループsim時間
28 lab="P1";
29 fnum=[2 21];%開ループ,閉ループ,図番
30 elseif (P2_select== true)
31 P=hs.P2();
32 t_end=[10 10];
33 lab="P2";
34 fnum=[3 31];
35 elseif (P3_select== true)
36 P=hs.P3();
37 t_end=[5 5];
38 lab="P3";
39 fnum=[4 41];
40 else
41% H=errordlg("制御対象を選択してください");
42 H=errordlg("Select Control Object Trans.");
43 uiwait(H);
44 %exit;終了してしまう?
45 end
46end
47
48
49function [C]=set_pid_cont(KP,TI,TD)
50 if(TI!=0)
51 if(TD!=0)
52 tau=0.1*TD;%Uのグラフを描くためこの形式を使用
53 C=KP*(1+tf(1,[TI 0])+tf([TD 0],[tau 1]));
54 else
55 C=KP*(1+tf(1,[TI 0]));
56 end
57 else
58
59 if(TD!=0)
60 tau=0.1*TD;%Uのグラフを描くためこの形式を使用
61 C=KP*(1+tf([TD 0],[tau 1]));
62 else
63 C=KP;
64 end
65 end
66end
67
68function [GC UC]=set_close_tf(C,P)
69 L=C*P;
70 GC=minreal(L/(1+L));
71 UC=minreal(C/(1+L));%入力表示
72end
73function Time_sim(GCL,UCL, leg,ti,fnum,wind)
74
75 cl={[0 0 1],[0 0.51 0],[1 0 0],[0.3 0.74 0.93],[0.49 0.18 0.55],[0.93 0.69 0.12],[0 0.44 0.74],[0.46 0.67 0.18],[0.85 0.32 0.09]};
76 %bgrcm(紫)ybg(薄緑)r(茶)
77
78 %linewidthはpt, 1.5pt=2px,1.125pt=1.5px
79 lw=1.125;
80
81 [c lnum ]=size(leg);%legendの数(入力で),1*lnum
82 for i=1:lnum
83 y(:,i)=step(GCL{i},ti);
84 uin(:,i)=step(UCL{i},ti);
85 end
86 figure(fnum,"position",wind)
87 set(fnum,"position",wind);
88 clf
89 figure(fnum);%,"position",wind)
90
91 for i=1:lnum
92 plot(ti,y(:,i),'color',cl{i+3},'linewidth',lw);%rを避けるため+3
93 hold on
94 end
95 set(gca,'xlabel','time s','ylabel','y');
96
97 if(lnum==2)
98 legend(leg{1},leg{2},'location','southeast');
99 elseif(lnum==3)
100 legend(leg{1},leg{2},leg{3},'location','southeast');
101 elseif(lnum==4)
102 legend(leg{1},leg{2},leg{3},leg{4},'location','southeast');
103 end
104
105 fnum=fnum+1;
106 figure(fnum,"position",wind)
107 set(fnum,"position",wind);
108 clf
109 figure(fnum);%,"position",wind)
110
111 for i=1:lnum
112 plot(ti,uin(:,i),'color',cl{i+3},'linewidth',lw);%rを避けるため+3
113 hold on
114 end
115 set(gca,'xlabel','time s','ylabel','u in');
116
117
118 if(lnum==2)
119 legend(leg{1},leg{2},'location','southeast');
120 elseif(lnum==3)
121 legend(leg{1},leg{2},leg{3},'location','southeast');
122 elseif(lnum==4)
123 legend(leg{1},leg{2},leg{3},leg{4},'location','southeast');
124 end
125end
126
127
128function [r st bl]=get_from_edit(edit_value)
129
130 bl=1;
131 if(size(edit_value)==0)%空白の場合を見つける
132 bl=false;
133 end
134
135 [r st]=str2num(edit_value);%status:数値以外は0,ただし空白でもtrue
136
137 if ((st==false)|| (bl==false))%数値以外は0で戻る
138 r=0;
139 end
140end
141
142function update_plot(obj, init=false)
143 hs=guidata(obj);
144
145 P1_select=get(hs.rbP1,"value");
146 P2_select=get(hs.rbP2,"value");
147 P3_select=get(hs.rbP3,"value");
148
149 lmt_sense=get(hs.rb_lmt,"value");
150 step_method=get(hs.rb_open,"value");
151
152 STEP_res_draw=false;
153 STEP_res_file=false;
154 Q1_STEP_res_draw=false;
155 Q1_STEP_res_file=false;
156
157
158 tag=1;
159 [lmt_gain_gui st(tag) bl(tag)]=get_from_edit(get(hs.rb_lmt_gain_edit,"string")); tag=tag+1;
160
161 [Lmt_K_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Lmt_K_edit,"string")); tag=tag+1;
162 [Lmt_Ti_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Lmt_Ti_edit,"string")); tag=tag+1;
163 [Lmt_Td_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Lmt_Td_edit,"string")); tag=tag+1;
164
165 [Step_K_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Step_K_edit,"string")); tag=tag+1;
166 [Step_Ti_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Step_Ti_edit,"string")); tag=tag+1;
167 [Step_Td_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Step_Td_edit,"string")); tag=tag+1;
168
169 [Tune_K_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Tune_K_edit,"string")); tag=tag+1;
170 [Tune_Ti_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Tune_Ti_edit,"string")); tag=tag+1;
171 [Tune_Td_val_gui st(tag) bl(tag)]=get_from_edit(get(hs.Tune_Td_edit,"string")); tag=tag+1;
172
173 % get_call_back_object:
174 ## gcbo holds the handle of the control
175 switch (gcbo)
176 case {hs.rbP1} % buttongroupは全イベント起こるので場合分け必要
177 if ( (get(hs.rbP1, "value")==true) && (get(hs.rbP2, "value")==false) && (get(hs.rbP3, "value")==false) )
178 P1_select=true;
179 P2_select=false;
180 P3_select=false;
181 else
182 P1_select=false;
183 P2_select=false;
184 P3_select=false;
185 end
186 case {hs.rbP2}
187 if ( (get(hs.rbP1, "value")==false) && (get(hs.rbP2, "value")==true) && (get(hs.rbP3, "value")==false) )
188 P2_select=true;
189 P1_select=false;
190 P3_select=false;
191 else
192 P1_select=false;
193 P2_select=false;
194 P3_select=false;
195 end
196 case {hs.rbP3}
197 if ( (get(hs.rbP1, "value")==false) && (get(hs.rbP2, "value")==false) && (get(hs.rbP3, "value")==true) )
198 P3_select=true;
199 P1_select=false;
200 P2_select=false;
201 else
202 P1_select=false;
203 P2_select=false;
204 P3_select=false;
205 end
206
207
208 case {hs.rb_lmt}
209 if ( (get(hs.rb_lmt, "value")==true) && (get(hs.rb_open, "value")==false))
210 lmt_sense=true;
211 step_method=false;
212 else
213 lmt_sense=false;
214 step_method=false;
215 end
216 case {hs.rb_open}
217 if ( (get(hs.rb_open, "value")==true) && (get(hs.rb_lmt, "value")==false))
218 step_method=true;
219 lmt_sense=false;
220 else
221 lmt_sense=false;
222 step_method=false;
223 end
224 case {hs.rb_lmt_gain_edit}
225 tag=1;
226 [lmt_gain_gui st(tag) bl(tag)]=get_from_edit(get(gcbo,"string"));
227 STEP_res_draw=true;
228 case {hs.STEP_res_button}
229 STEP_res_draw=true;
230 case {hs.STEP_res_file_button}
231 STEP_res_file=true;
232 case {hs.STEP_res_button_1}
233 Q1_STEP_res_draw=true;
234 case {hs.STEP_res_file_button_1}
235 Q1_STEP_res_file=true;
236 case {hs.Step_K_edit}
237 tag=5;
238 [Step_K_val_gui st(tag) bl(tag)]=get_from_edit(get(gcbo, "string"));
239 case {hs.Step_Ti_edit}
240 tag=6;
241 [Step_Ti_val_gui st(tag) bl(tag)]=get_from_edit(get(gcbo, "string"));
242 case {hs.Step_Td_edit}
243 tag=7;
244 [Step_Td_val_gui st(tag) bl(tag)]=get_from_edit(get(gcbo, "string"));
245
246 case {hs.Tune_K_edit}
247 tag=8;
248 [Tune_K_val_gui st(tag) bl(tag)]=get_from_edit(get(gcbo, "string"));
249 case {hs.Tune_Ti_edit}
250 tag=9;
251 [Tune_Ti_val_gui st(tag) bl(tag)]=get_from_edit(get(gcbo, "string"));
252 case {hs.Tune_Td_edit}
253 tag=10;
254 [Tune_Td_val_gui st(tag) bl(tag)]=get_from_edit(get(gcbo, "string"));
255
256 end %end of case
257
258 if (min(bl)==0)
259 % msgbox("PIDパラメータに空白の設定を発見しましたので0としました","注意")
260 msgbox("FOUND blank term in PID pars., treated as zero.","caution");
261 end
262 if (min(st)==0)
263 % msgbox("PIDパラメータに数値以外の設定を発見しましたので0としました","注意")
264 msgbox("FOUND non number on PID pars., treated as zero","caution");
265 end
266
267 if((STEP_res_draw==true) || (STEP_res_file==true))
268
269 if((step_method==false) && (lmt_sense==false))
270 % H=errordlg("出力応答方法を選択してください");
271 H=errordlg("Set OUTPUT method","caution");
272 uiwait(H);
273 return
274 end
275
276
277 [P tnum lab fnum]=set_model(obj,P1_select,P2_select,P3_select);
278 %tnum=[開ループsim時間 閉ループsim時間]
279 dt=0.01;
280 ti=[0:dt:tnum(1)];
281
282 if(lmt_sense==true)
283 L=lmt_gain_gui*P;
284 G=L/(1+L);
285 fn=fnum(1);%lmd/stpで図番変える
286 %msgbox(["制御対象" lab "の限界感度法実施"],"出力応答実施");
287 msgbox(["Exec limit sens. method using " lab ],"OUTPUT");
288 elseif(step_method==true)
289 G=P;
290 fn=fnum(1)*10;
291 % msgbox(["制御対象" lab "のステップ応答実施"],"出力応答実施");
292 msgbox(["STEP resp. using " lab ],"OUTPUT");
293 else
294 return
295 end
296 %PID設計用の出力応答を見る時はfnumはPによって変える@set_model
297 fh=figure(fn);%,"position",hs.wind);
298 set(fh,"position",hs.wind);
299 figure(fn)
300 step(G,ti);
301 legend("off");
302
303 if(STEP_res_file==true)
304 prt_fig(["OUT_res_" lab ],fn);%lab:P1,P2,P3
305 % msgbox(["fig\\_" num2str(fn) "\\_OUT\\_res.pngで保存しました"],"案内");
306 msgbox(["Saved as fig\\_" num2str(fn) "\\_OUT\\_res\\_" lab ".png"],"Announce");
307 %uiwaitなしでmsgboxを連続すると、別windowが開くが、スルーする
308 end
309
310 end % end of 出力応答
311
312 %pid制御器設計
313 c_lmt=set_pid_cont(Lmt_K_val_gui,Lmt_Ti_val_gui,Lmt_Td_val_gui);
314 c_step=set_pid_cont(Step_K_val_gui,Step_Ti_val_gui,Step_Td_val_gui);
315 c_tune=set_pid_cont(Tune_K_val_gui,Tune_Ti_val_gui,Tune_Td_val_gui);
316 if((Q1_STEP_res_draw==true) || (Q1_STEP_res_file==true))
317 [P tnum lab fnum]=set_model(obj,P1_select,P2_select,P3_select);
318% msgbox(["制御対象は" lab "(s)です"]);
319 msgbox([lab "(s) is Control object"]);
320 %tnum=[開ループsim時間 閉ループsim時間]
321 dt=0.01;
322 ti=[0:dt:tnum(2)];
323 [GC{1} UC{1}]=set_close_tf(c_lmt,P);
324 [GC{2} UC{2}]=set_close_tf(c_step,P);
325 [GC{3} UC{3}]=set_close_tf(c_tune,P);
326
327 leg={"set1","set2","set3"};%1*3
328
329 Time_sim(GC, UC, leg,ti,fnum(2),hs.wind);
330
331 if(Q1_STEP_res_file==true)
332 prt_fig(["Q1_" lab],fnum(2));%lab:P1,or,P2
333 prt_fig(["Q1_" lab],fnum(2)+1);%制御入力
334 fnbody=["\\_Q1\\_" lab ".png"];
335 % msgbox(["fig\\_" num2str(fnum(2)) fnbody "と\n fig\\_" num2str(fnum(2)+1) fnbody "で保存しました"]);
336 msgbox(["Saved as fig\\_" num2str(fnum(2)) fnbody "and\n fig\\_" num2str(fnum(2)+1) fnbody ],"Success");
337
338 end
339
340 end
341end
342
343
344gp = uibuttongroup ("title","制御対象","Position", [ 0.05 0.56 0.13 0.43]);
345
346%## Create a buttons in the group
347h.rbP1 = uicontrol (
348 "parent", gp,
349 "style", "radiobutton",
350 "units", "normalized",
351 "string", "P1(s)",
352 "value", false,
353 "horizontalalignment", "left",
354 "Position", [ 0.1 0.7 0.8 0.2 ],
355 "callback",@update_plot);
356h.rbP2 = uicontrol (
357 "parent", gp,
358 "style", "radiobutton",
359 "units", "normalized",
360 "string", "P2(s)",
361 "value", false,
362 "horizontalalignment", "left",
363 "Position", [ 0.1 0.4 0.8 0.2 ],
364 "callback",@update_plot);
365h.rbP3 = uicontrol (
366 "parent",gp,
367 "style", "radiobutton",
368 "units", "normalized",
369 "string", "P3(s)",
370 "value", false,
371 "horizontalalignment", "left",
372 "Position", [ 0.1 0.1 0.8 0.2 ],
373 "callback",@update_plot);
374% b1/b2/b3いずれかだけ
375
376
377h.Menu=uipanel("title","出力応答実施項目設定","position",[0.2 0.56 0.75 0.43]);
378
379gp2 = uibuttongroup (h.Menu, "title","出力応答","Position", [ 0.01 0.1 0.6 0.8]);
380
381%## Create a buttons in the group
382h.rb_lmt = uicontrol (
383 "parent", gp2,
384 "style", "radiobutton",
385 "units", "normalized",
386 "string", "限界感度法",
387 "value", false,
388% "callback",@update_plot,
389 "horizontalalignment", "left",
390 "Position", [ 0.01 0.7 0.7 0.22 ]);
391
392h.rb_open = uicontrol (
393 "parent", gp2,
394 "style", "radiobutton",
395 "units", "normalized",
396 "string", "ステップ応答",
397 "value", false,
398% "callback",@update_plot,
399 "horizontalalignment", "left",
400 "Position", [ 0.01 0.1 0.7 0.22 ]);
401
402h.rb_lmt_label = uicontrol (
403 "parent", gp2,
404 "style", "text",
405 "units", "normalized",
406 "string", "限界感度法のゲインK",
407 "value", false,
408% "callback",@update_plot,
409 "horizontalalignment", "left",
410 "Position", [ 0.1 0.45 0.62 0.22 ]);
411
412h.rb_lmt_gain_edit = uicontrol (
413 "parent", gp2,
414 "style", "edit",
415 "units", "normalized",
416 "string", "1",
417% "value", "",
418 "horizontalalignment", "left",
419 "Position", [ 0.73 0.45 0.2 0.22 ],
420 "callback",@update_plot);
421
422h.STEP_res_button=uicontrol(
423 "parent",h.Menu,
424 "style","pushbutton",
425 "units", "normalized",
426 "string","出力応答表示",
427 "callback", @update_plot,
428 "horizontalalignment", "left",
429 "position", [0.63 0.6 0.35 0.2]);
430
431h.STEP_res_file_button=uicontrol(
432 "parent",h.Menu,
433 "style","pushbutton",
434 "units", "normalized",
435 "string","出力応答ファイル保存",
436 "callback", @update_plot,
437 "horizontalalignment", "left",
438 "position", [0.63 0.2 0.35 0.2]);
439
440
441h.Q1=uipanel("title","PID Gain set","position",[0.05 0.05 0.9 0.5]);
442
443p_x_pos=0.01;
444p_y_pos=0.65;
445p_width=0.7;
446p_l_width=p_width/10 ;%label_width
447p_e_width=p_l_width*2.8;%editbox_width
448p_height=0.32;
449
450
451h.Lmt=uipanel("parent",h.Q1,
452 "title","ゲインset1","position",[p_x_pos p_y_pos p_width p_height]);
453h.Step=uipanel("parent",h.Q1,
454 "title","ゲインset2","position",[p_x_pos p_y_pos-p_height p_width p_height]);
455h.Tune=uipanel("parent",h.Q1,
456 "title","ゲインset3","position",[p_x_pos p_y_pos-p_height*2 p_width p_height]);
457
458
459
460h.STEP_res_button_1=uicontrol(
461 "parent",h.Q1,
462 "style","pushbutton",
463 "units", "normalized",
464 "string","出力応答表示",
465 "callback", @update_plot,
466 "horizontalalignment", "left",
467 "position", [0.71 0.5 0.28 0.2]);
468h.STEP_res_file_button_1=uicontrol(
469 "parent",h.Q1,
470 "style","pushbutton",
471 "units", "normalized",
472 "string","出力応答ファイル保存",
473 "callback", @update_plot,
474 "horizontalalignment", "left",
475 "position", [0.71 0.1 0.28 0.2]);
476
477%label_mn:m行n列
478label_11=[0.05 0.05 p_l_width 0.8];
479label_12=[0.05+p_l_width 0.05 p_e_width 0.8];
480label_13=[0.1+p_l_width+p_e_width*1 0.05 p_l_width 0.8];
481label_14=[0.1+p_l_width*2+p_e_width*1 0.05 p_e_width 0.8];
482label_15=[0.15+p_l_width*2+p_e_width*2 0.05 p_l_width 0.8];
483label_16=[0.15+p_l_width*3+p_e_width*2 0.05 p_e_width 0.8];
484label_btn=[0.75 0.1 0.2 0.2];
485
486h.Lmt_K_label=uicontrol(
487 "parent",h.Lmt,
488 "style","text",
489 "units", "normalized",
490 "string","Kp",
491% "callback", @update_plot,
492 "horizontalalignment", "left",
493 "position", label_11);
494h.Lmt_K_edit=uicontrol(
495 "parent",h.Lmt,
496 "style","edit",
497 "units", "normalized",
498 "string","0",
499 "callback", @update_plot,
500 "horizontalalignment", "left",
501 "position", label_12);
502
503h.Lmt_Ti_label=uicontrol(
504 "parent",h.Lmt,
505 "style","text",
506 "units", "normalized",
507 "string","Ti",
508% "callback", @update_plot,
509 "horizontalalignment", "left",
510 "position", label_13);
511h.Lmt_Ti_edit=uicontrol(
512 "parent",h.Lmt,
513 "style","edit",
514 "units", "normalized",
515 "string","0",
516 "callback", @update_plot,
517 "horizontalalignment", "left",
518 "position", label_14);
519h.Lmt_Td_label=uicontrol(
520 "parent",h.Lmt,
521 "style","text",
522 "units", "normalized",
523 "string","Td",
524% "callback", @update_plot,
525 "horizontalalignment", "left",
526 "position", label_15);
527h.Lmt_Td_edit=uicontrol(
528 "parent",h.Lmt,
529 "style","edit",
530 "units", "normalized",
531 "string","0",
532 "callback", @update_plot,
533 "horizontalalignment", "left",
534 "position", label_16);
535
536h.Step_K_label=uicontrol(
537 "parent",h.Step,
538 "style","text",
539 "units", "normalized",
540 "string","Kp",
541% "callback", @update_plot,
542 "horizontalalignment", "left",
543 "position", label_11);
544h.Step_K_edit=uicontrol(
545 "parent",h.Step,
546 "style","edit",
547 "units", "normalized",
548 "string","0",
549 "callback", @update_plot,
550 "horizontalalignment", "left",
551 "position", label_12);
552
553h.Step_Ti_label=uicontrol(
554 "parent",h.Step,
555 "style","text",
556 "units", "normalized",
557 "string","Ti",
558% "callback", @update_plot,
559 "horizontalalignment", "left",
560 "position", label_13);
561h.Step_Ti_edit=uicontrol(
562 "parent",h.Step,
563 "style","edit",
564 "units", "normalized",
565 "string","0",
566 "callback", @update_plot,
567 "horizontalalignment", "left",
568 "position", label_14);
569
570h.Step_Td_label=uicontrol(
571 "parent",h.Step,
572 "style","text",
573 "units", "normalized",
574 "string","Td",
575% "callback", @update_plot,
576 "horizontalalignment", "left",
577 "position", label_15);
578h.Step_Td_edit=uicontrol(
579 "parent",h.Step,
580 "style","edit",
581 "units", "normalized",
582 "string","0",
583 "callback", @update_plot,
584 "horizontalalignment", "left",
585 "position", label_16);
586
587
588h.Tune_K_label=uicontrol(
589 "parent",h.Tune,
590 "style","text",
591 "units", "normalized",
592 "string","Kp",
593% "callback", @update_plot,
594 "horizontalalignment", "left",
595 "position", label_11);
596h.Tune_K_edit=uicontrol(
597 "parent",h.Tune,
598 "style","edit",
599 "units", "normalized",
600 "string","0",
601 "callback", @update_plot,
602 "horizontalalignment", "left",
603 "position", label_12);
604
605h.Tune_Ti_label=uicontrol(
606 "parent",h.Tune,
607 "style","text",
608 "units", "normalized",
609 "string","Ti",
610% "callback", @update_plot,
611 "horizontalalignment", "left",
612 "position", label_13);
613h.Tune_Ti_edit=uicontrol(
614 "parent",h.Tune,
615 "style","edit",
616 "units", "normalized",
617 "string","0",
618 "callback", @update_plot,
619 "horizontalalignment", "left",
620 "position", label_14);
621h.Tune_Td_label=uicontrol(
622 "parent",h.Tune,
623 "style","text",
624 "units", "normalized",
625 "string","Td",
626% "callback", @update_plot,
627 "horizontalalignment", "left",
628 "position", label_15);
629h.Tune_Td_edit=uicontrol(
630 "parent",h.Tune,
631 "style","edit",
632 "units", "normalized",
633 "string","0",
634 "callback", @update_plot,
635 "horizontalalignment", "left",
636 "position", label_16);
637
638set(h.gf, "color", get(h.gf, "defaultuicontrolbackgroundcolor"));
639guidata(h.gf,h);
640update_plot(h.gf,true);